
Arduino เอาไปทำอะไรได้บ้าง ตอนที่ 8 : การใช้งาน L298N motor driver
H-Bridge เป็นโมดูลที่ใช้ในการควบคุมความเร็วและทิศทางของมอเตอร์ และยังสามารถนำไปประยุกต์ใช้กับโปรเจคอื่นได้อีกด้วย เช่น ปรับค่าความสว่างของหลอดไฟ
วิธีการทำงาน
H-Bridge เป็นวงจรที่สามารถใช้ควบคุมกระแสได้ทั้งขั้วบวกและลบด้วยการควบคุม pulse width modulation (PWM)
PWM หมายถึง การควบคุมช่วงจังหวะการทำงานของอิเล็กตรอน ลองจินตนาการถึงแปรงขดลวดในมอเตอร์เป็นระหัดวิดน้ำและอิเล็กตรอนเป็นน้ำที่ตกลงมาจากระหัดวิดน้ำ
ค่าแรงดันไฟฟ้าก็คล้ายกับกระแสน้ำที่ไหลผ่านระหัดวิดน้ำด้วยความเร็วคงที่ ยิ่งกระแสน้ำไหลเร็วเท่าไรก็จะหมายความว่าแรงดันไฟฟ้ายิ่งสูงขึ้น แต่มอเตอร์มีอัตราความเร็วคงที่และสามารถเสียหายได้หากมีแรงดันไฟฟ้าสูงไหลผ่านหรือหยุดทันทีเพื่อที่จะหยุดมอเตอร์ ดังนั้น PWM คล้ายกับการควบคุมระหัดวิดน้ำให้ตักน้ำในจังหวะคงที่ที่กระแสน้ำคงที่ ยิ่งระหัดวิดน้ำหมุนเร็วเท่าไรช่วงของ pulse ก็จะยาวขึ้น ในทางกลับกันถ้าระหัดวิดน้ำหมุนช้าช่วงของ pulse จะสั้นลง ดังนั้นเพื่อยืดอายุการใช้งานของมอเตอร์จึงควรที่จะควบคุมมอเตอร์ด้วย PWM
พิจารณาโครงสร้างโค้ดคร่าวๆของ Arduino
โค้ดการทำงานของ Arduino มีการพัฒนาขึ้นเรื่อยๆ แต่ยังไม่มีสร้าง library ที่เกี่ยวกับตัว L298N Dual H-Bridge เพื่อควบคุมมอเตอร์ดังนั้นผู้ใช้งานจึงต้องประกาศพินเพื่อใช้งานขึ้นมาเอง สามารถใช้โค้ด int dir(number)Pin(letter) ต่อเข้ากับพินดิจิตอลที่เลือกใช้ แค่นี้ก็สามารถทำงานได้อย่างถูกต้องและช่วยให้ตัว L298N Dual H-Bridge ควบคุมมอเตอร์ได้อย่างอเนกประสงค์ถ้าบอร์ด Arduino ที่เลือกใช้งานมีพินหลายตัว และถ้าต้องการปรับความเร็วของมอเตอร์ด้วย PWM สามารถใช้คำสั่ง int speedPin(letter) แล้วต่อเข้ากับพินที่เลือกใช้ หากต้องการวิธีลัดเพื่อใช้งาน PWM ย่างรวดเร็วสามารถเลือกพินใช้งานได้ตามรายการด้านล่าง
AT MEGA –PWM 2-13 และ 44-46 ตั้งค่าเอาท์พุทของ PWM ให้เป็น 8 bit ด้วยฟังก์ชั่น analogWrite()
UNO-PWM 3, 5, 6, 9, 10 และ 11 ตั้งค่าเอาท์พุทของ PWM ให้เป็น 8 bit ด้วยฟังก์ชั่น analogWrite()
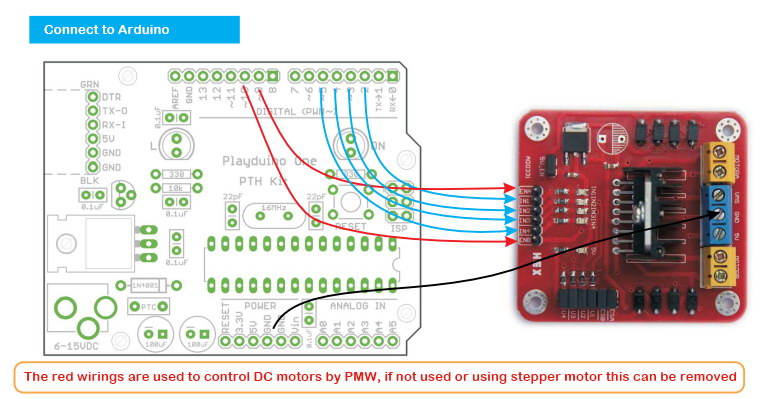
ตัวอย่างการต่อวงจร
ตัวอย่างโปรแกรม
//Code by Reichenstein7 (thejamerson.com)
//Keyboard Controls:
// 1 -Motor 1 Left
// 2 -Motor 1 Stop
// 3 -Motor 1 Right
// 4 -Motor 2 Left
// 5 -Motor 2 Stop
// 6 -Motor 2 Right
// Declare L298N Dual H-Bridge Motor Controller directly since there is not a library to load.
// Motor 1
int dir1PinA = 2;
int dir2PinA = 3;
int speedPinA = 9; // Needs to be a PWM pin to be able to control motor speed
// Motor 2
int dir1PinB = 4;
int dir2PinB = 5;
int speedPinB = 10; // Needs to be a PWM pin to be able to control motor speed
void setup() { // Setup runs once per reset
Serial.begin(9600);
//Define L298N Dual H-Bridge Motor Controller Pins
pinMode(dir1PinA,OUTPUT);
pinMode(dir2PinA,OUTPUT);
pinMode(speedPinA,OUTPUT);
pinMode(dir1PinB,OUTPUT);
pinMode(dir2PinB,OUTPUT);
pinMode(speedPinB,OUTPUT);
}
void loop() {
// Initialize the Serial interface:
if (Serial.available() > 0) {
int inByte = Serial.read();
int speed; // Local variable
switch (inByte) {
//______________Motor 1______________
case '1': // Motor 1 Forward
analogWrite(speedPinA, 255);//Sets speed variable via PWM
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Forward"); // Prints out “Motor 1 Forward†on the serial monitor
Serial.println(" "); // Creates a blank line printed on the serial monitor
break;
case '2': // Motor 1 Stop (Freespin)
analogWrite(speedPinA, 0);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Stop");
Serial.println(" ");
break;
case '3': // Motor 1 Reverse
analogWrite(speedPinA, 255);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Reverse");
Serial.println(" ");
break;
//______________Motor 2______________
case '4': // Motor 2 Forward
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Forward");
Serial.println(" ");
break;
case '5': // Motor 1 Stop (Freespin)
analogWrite(speedPinB, 0);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Stop");
Serial.println(" ");
break;
case '6': // Motor 2 Reverse
analogWrite(speedPinB, 255);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Reverse");
Serial.println(" ");
break;
default:
// turn all the connections off if an unmapped key is pressed:
for (int thisPin = 2; thisPin < 11; thisPin++)
{
digitalWrite(thisPin, LOW);
}
}
}
}

เช็คสถานะสินค้า



ระบบสมาชิก
